AllenAct Tutorials#
Note The provided commands to execute these tutorials assume you have installed the full library and the specific requirements for each used plugin.
We provide several tutorials to help ramp up researchers to the field of Embodied-AI as well as to the AllenAct framework.
Navigation in MiniGrid#

We train an agent to complete the MiniGrid-Empty-Random-5x5-v0 task within the MiniGrid environment.
This tutorial presents:
- Writing an experiment configuration file with a simple training pipeline from scratch.
- Using one of the supported environments with minimal user effort.
- Training, validation and testing your experiment from the command line.
PointNav in RoboTHOR#

We train an agent on the Point Navigation task within the RoboTHOR Embodied-AI environment.
This tutorial presents:
- The basics of the Point Navigation task, a common task in Embodied AI
- Using an external dataset
- Writing an experiment configuration file with a simple training pipeline from scratch.
- Use one of the supported environments with minimal user effort.
- Train, validate and test your experiment from the command line.
- Testing a pre-trained model
Swapping in a new environment#

This tutorial demonstrates how easy it is modify the experiment config created in the RoboTHOR PointNav tutorial to work with the iTHOR and Habitat environments.
Using a pretrained model#
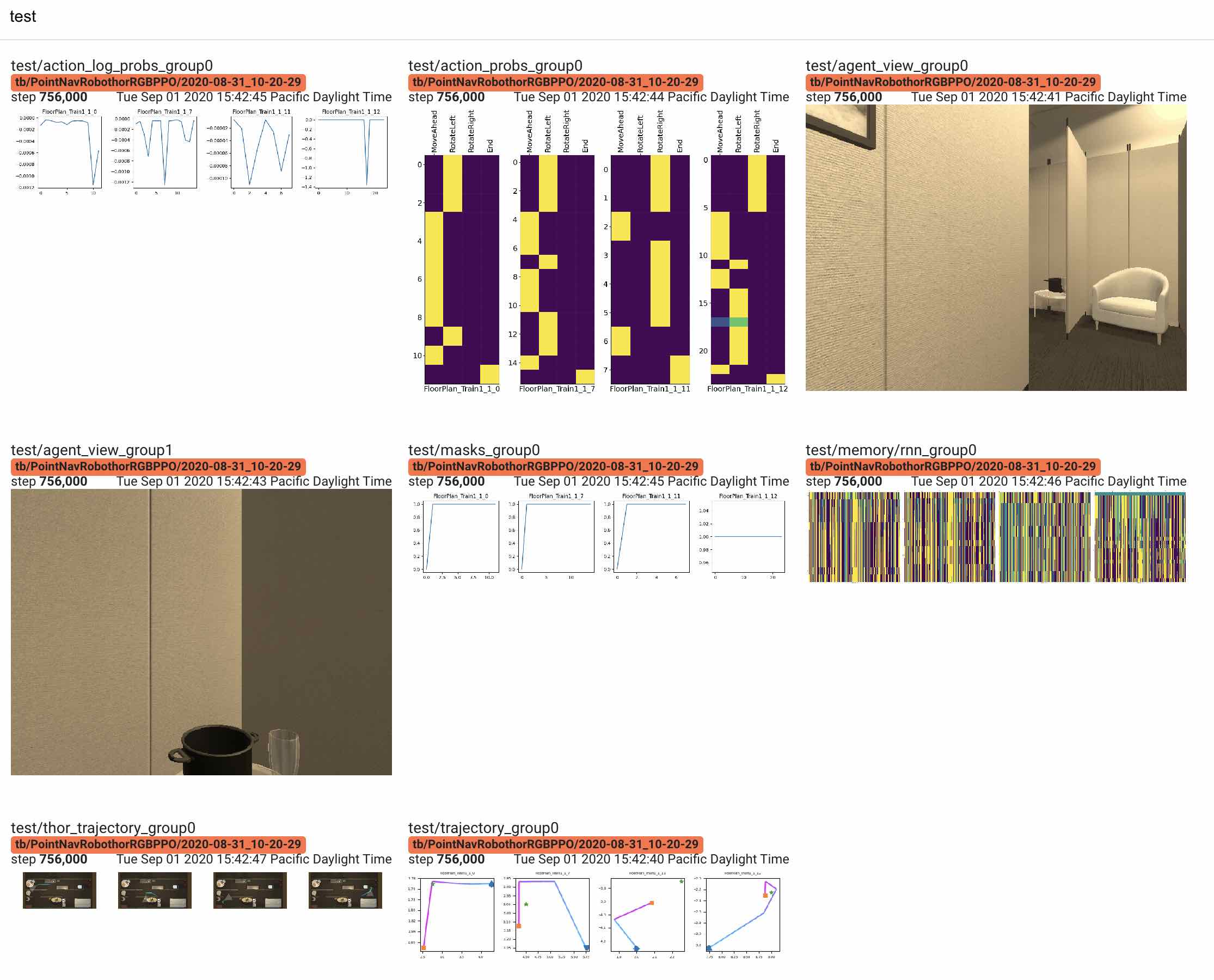
This tutorial shows how to run inference on one or more checkpoints of a pretrained model and generate visualizations of different types.
Off-policy training#
This tutorial shows how to train an Actor using an off-policy dataset with expert actions.
OpenAI gym for continuous control#
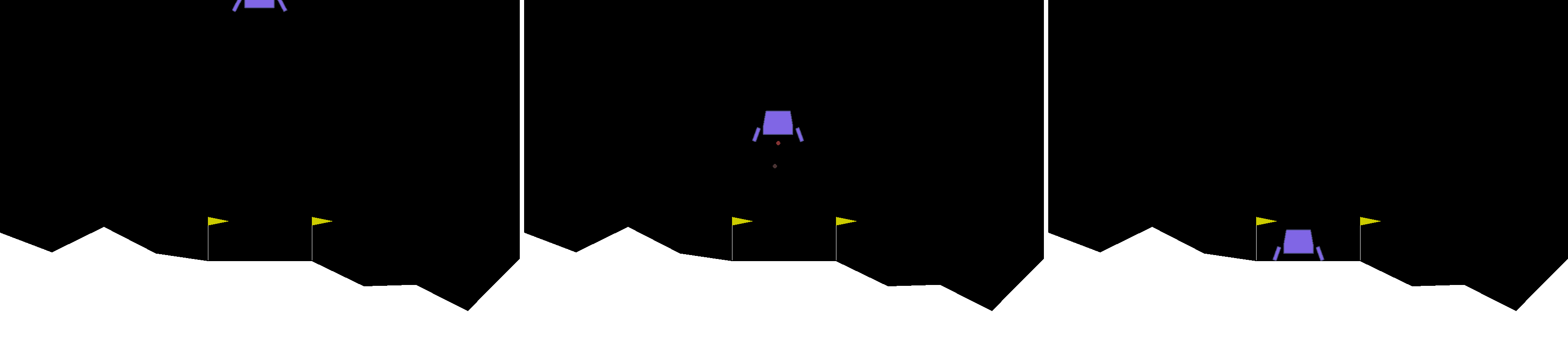
We train an agent to complete the LunarLanderContinuous-v2 task from
OpenAI gym.
This tutorial presents:
- A
gymplugin foprAllenAct. - A continuous control example with multiple actors using PPO.
Multi-node training for RoboTHOR ObjectNav#
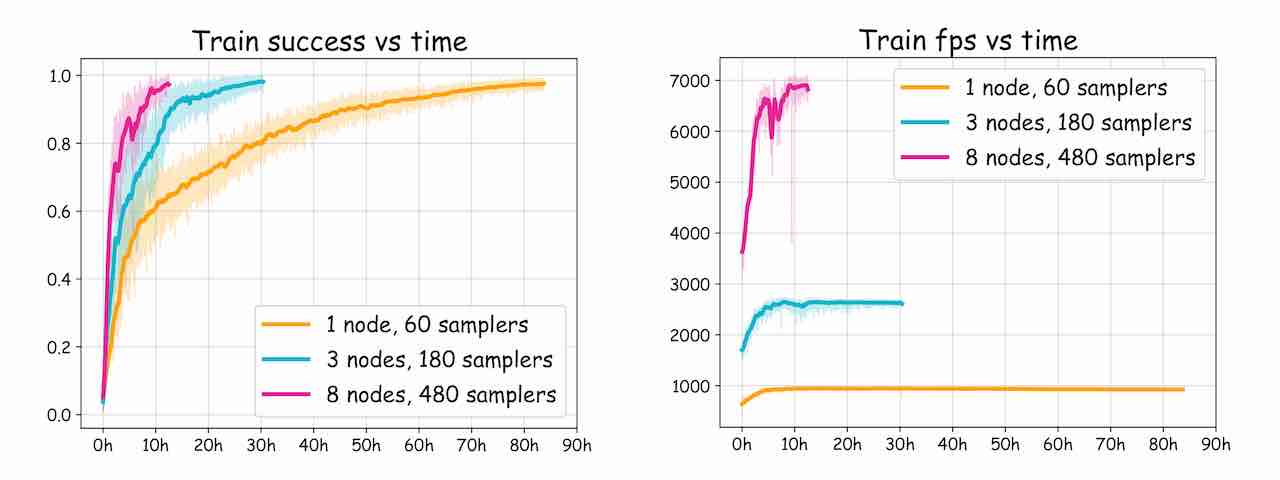
We train an agent to navigate to an object in a fraction of the time required for training in one node by distributing training across multiple nodes.
This tutorial presents:
- The AllenAct API for training across multiple nodes, as well as experimental scripts for distributed configuration, training start and termination, and remote command execution.
- The introduction of the headless mode for AI2-THOR in
AllenaAct.